
Motors pas a pas com el de la imatge són utilitzats per al posicionament de precisió en dispositius com impressores, escàners i fotocopiadores, i també en robòtica i animatrònica.
A diferència dels servomotors, no necessiten realimentació, funcionen en llaç obert, aplicant la seqüencia adequada de polsos a cadascuna de les seves bobines giren un nombre de graus especificat.
Circuits integrats com el SAA1027 en faciliten el control; tan sols cal indicar a l’esmentat circuit aplicant el nivell de tensió adequada al seu pin 3 el sentit del gir i tants polsos al seu pin 15 com passos volem que avanci en el sentit indicat; cada pas és un gir d’un nombre de graus determinat, en el cas del motor de la imatge, com podem veure a l’etiqueta que porta adherida, cada pas són 7,5°. SAA1027 controlarà per nosaltres les 4 bobines del motor per a que realitzi el moviment que volem.
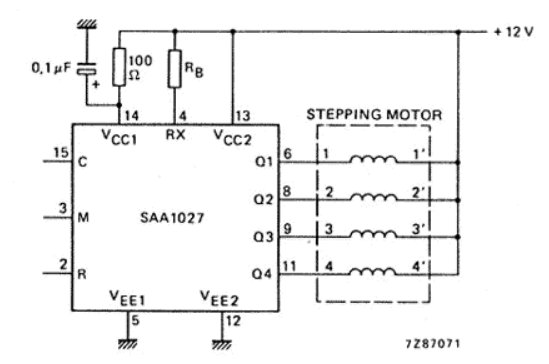
El pin 2 és el pin de “reset” o reinici, habitualment no s’utilitza i es connecta a +12V; el valor de la resistència RB varia segons el corrent absorbit pel motor pas a pas concret que utilitzem, cal consultar les especificacions del motor i la fitxa tècnica del fabricant del circuit integrat per utilitzar el valor òptim en cada cas.
Oriol López
M'agrada llegir i el món de la tecnologia
